Abstract
The energy consumption of walking robots has been considered on the base of solution of variational problem. It is fixed that the gait is affected on the energy efficiency and must vary with speed.
1. Introduction
One of the problems of walking robots is their low energy efficiency. It is known [1] that energy consumptions grow in proportion to the cube of speed when walking robot moves with constant velocity of its body. This is due with the periodic acceleration and deceleration of unbalanced walking mechanisms in the transfer phase from one position to another. The use of energy recovery allowing to accumulate energy in the braking phase of the walking mechanism in the transfer and then to give it in the phase of accelerating, allows to increase the energy efficiency [2].
It is known methods to improve energy efficiency at the expense of motion comfort as bipedal [3] and multilegged robots [4]. For multilegged robots with dual walking mechanisms resulting equation gives you the opportunity to choose such law of motion, which ensures low energy consumption [5]. This equation for walking movers operating from a common motor has a form:
where is kinetic energy of robots body and its movers; , , , - according resistance force and the velocity of the body translational motion in the current time and their average values in the one cycle.
In the general case the Eq. (1) is nonlinear differential equation of the second order with respect to the coordinates.
2. Statement of the problem
As we know there is a fairly complete classification of possible gaits of multilegged walking robots during their translational motion with rectilinear and uniform motion of body center of mass. The ratio mode is the important element of classification:
where is the time spent of walking mechanism in the phase of interacting with supported surface, is total cycle time.
The another important feature is the time of the start transfer of mover to a new position. The countdown is since the beginning of shifting phase of one of the walking mechanism.
This mechanism is considered as baseline = 0.
Given that of the beginning and end of the transfer, mover it absolute speed:
the motion of the body is performed without sliding of its pads on the ground.
The possible dependence are shown in the Fig. 1.
Fig. 1Velocities of movers for example gait (τ = 0.5 second): 1 – The baseline walking mechanism τj = 0, 2 – j walking mechanism in case τj > 0, 3 – j walking mechanism in case τj < 0.
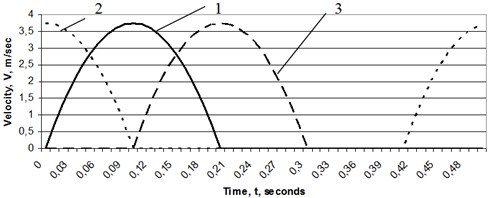
The simplest analytical dependence of the absolute speed with time and satisfying the set conditions in Eq. (3) has the form:
where is the distance at which the walking mechanism pad is transferred over time .
The main goal of submitted paper is to define such a low of rectilinear motion of the robot center of mass during its forward motion which provides the minimum of total heat losses all engines that control motion of all movers at various gaits and speeds.
3. Design scheme and mathematical model of walking robot
The translational motion of walking robot body of mass and its movers of mass each are studied. These motions are described by absolute coordinates , (Fig. 2) at that – coordinate of mover installation, – coordinate mover with respect to the point of its installation.
Fig. 2Design scheme of walking robot
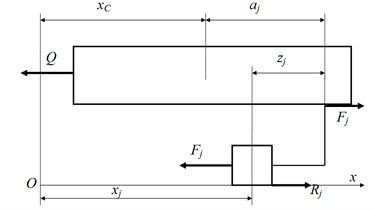
The resistance force and forces of interactions between the body of walking robot and their movers are generated by drives of the course motion. The interaction of mover with supported surface is taken into account by tangent forces . The supported surface is modeled by homogeneous elastic medium and the body of the robot is modeled by absolutely solid. For this reason, all reactions for movers interacted with a ground are equal each other:
Then the differential equations, described the motion of considered mechanical system have a form:
where is the total number of movers, is the number of movers interacted with the support surface in a given moment of time and dependent on the gait. It follows from Eq. (7) that the force, generated by actuator is determined from second equation for movers interactive with the support surface and for movers which are in phase of transfer the force is determined from third. The constant force is determined from the first Eq. (7):
The feature of the Eq. (8) is the fact that in the process of motion a number of movers interact with the supporting surface may change. Hence considered mechanical system is system of variable structure.
4. Method of solution
In accordance with the task the method of solution is based on the requirement of the minimum of integral.
It is taken into account the isoperimetric condition:
where is the distance, traversed by the body of robot during the time of interacting of walking mechanism with a supported surface.
Then we can obtain a new functional by combining Eq. (9) and Eq. (10):
where is undetermined Lagrange multiplier.
Since are defined as time function Eq. (4) and Eq. (5) and parameters , , , the Euler-Poisson equations [6], providing the minimum of functional has a form:
or in expended form:
where is arbitrary constant.
The Eq. (14) must satisfy the initial and final conditions:
which allow to determine three arbitrary constants of differential equation and the amount , – initial and final velocity of robot’s body in each cycle.
One more peculiarity of Eq. (14) is dependence of the amount of movers interacting with a support surface from the gait.
5. Examples of the influence of gait on energy efficiency
The real walking robot “Ortonog” [7] (Fig. 3) have been considered as example of walking robot.
Fig. 3Walking robot “Ortonog”

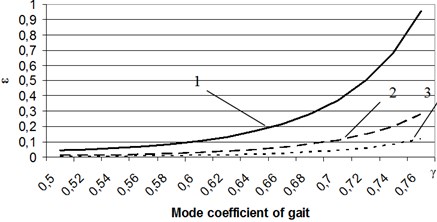
For this robot four mechanisms of walking always are interacted with the support surface. It is considered a such gait when the interacting with a support surface is carried out in pairs of two mechanisms of walking with ratio mode > 0.5. It is presented on chart in Fig. 4 the dimensionless parameter :
where is parameter proportional energy losses, depending on ratio mode and average speed of robot, is acceleration of gravity.
The results show us that in order to minimize the energy consumption it is necessary to change the gait. This is confirmed by theory of synchronization [8], behavior of animals and investigation of multilegged walking machines and robots motion [9].
Fig. 4Dependencies of the rate of energy loss of walking robot’s speed and gait 1 – V0 is 0.5 m/s, 2 – V0 is 0.33 m/s, 3 – V0 is 0.25 m/s
6. Conclusion
The gait of walking robot significant effects on the energy consumption. For each speed you should choose energy optimal gait, but the most effective use of such actuator together with control system which could independently change the gait.
References
-
Ohotsimsky D. Е., Platonov A. K., Kiril’chenko А. А., Lapshin V. V. Schagayuschie Maschiny (Walking Machines). Preprint IPM of M.V. Keldysch AN USSR, Moscow, 1989, (in Russian).
-
Lapshin V. V. Modelnye Ocenki Energozatrat Schagayuschego Apparata (Model Estimates of Energy Walking Machine). Izvestia RAS, МТТ (News of RAS. Mechanics of Solid Body), Vol. 1, 1993, p. 65-74, (in Russian).
-
Beletskiy V. V. Dvunogaya Hod’ba: Model’nye Zadachi Dinamiki i Upravleniya (Biped Walking: Modeling Problems of Dynamics and Control). Science, Moscow, 1984, (in Russian).
-
Briskin Е. S., Kalinin Ya V. On energetically efficient algorithms of walking machines with cyclic drives. Journal of Computer and Systems Sciences International, Vol. 50, Issue 2, 2011, p. 348-354.
-
Briskin Е. S., Chernyschev V. V., Kalinin Ya. V., Маloletov А. V. On the energy efficiency of cyclic mechanisms. Mechanic of Solids, Vol. 49, Issue 1, 2014, p. 11-17.
-
Halfman R. L. Dynamics. Addison-Wesley Publishing Company, Inc. Reading, Massachusetts, Palo Alto, London, 1962.
-
Briskin Е. S., Maloletov А. V., Sharonov N. G., Fomenko S. S., Kalinin Ya. V., Leonard А. V. Development of rotary type movers discretely interacting with supporting surface and problems of control their movement. Proceedings of the 21st CISM-IFToMM Symposium on Robot Design, Dynamics and Control, Udine, Italy, 2016, p. 351-359.
-
Blekhman I. I. Synchronization in Science and Technology. ASME Press, New York, 1981.
-
Briskin Е. S. Ob Obschei Dinamike i Povorote Shagayuschih Mashin (On General Dynamics and Turns of Walking Machines). Problemy Mashinostroeniya i Dinamiki Mashin (Problems of Engineering and Reliability of Machines), Vol. 6, 1997, p. 33-39, (in Russian).
About this article
The work was supported by the RFBR (Grants Nos. 14-01-00655-A, 14-08-01002-A) and by Grant of Ministry of Education and Science of Russian Federation No. 862.
