Abstract
Measurement of eigenfrequency using a dynamically directed vibroexciter is investigated. Lyapunov indicators are calculated for various values of parameters of the system. It is shown that when the frequency of excitation coincides with the eigenfrequency there is a positive Lyapunov indicator. Thus chaotic motion takes place and causes uncertainty in the measurement of eigenfrequency.
1. Introduction
Measurement of eigenfrequency using a dynamically directed vibroexciter is investigated. Lyapunov indicators are calculated for various values of parameters of the system. Calculation of Lyapunov indicators is based on the material presented in [1, 2].
It is shown that when the frequency of excitation coincides with the eigenfrequency there is a positive Lyapunov indicator. Thus chaotic motion takes place and causes uncertainty in the measurement of eigenfrequency. Related problems of chaotic motion are investigated in [3-5].
2. Model of the system
The system is described by the following equation:
where the upper dot denotes differentiation with respect to time and:
where and are the generalized coordinates, is the amplitude of excitation, is the frequency of excitation, is the inertial parameter of the system, and are the damping parameters of the system, is the stiffness parameter of the system, g is the acceleration of gravity, is time.
The following initial conditions are assumed:
3. Procedure of calculation of Lyapunov indicators
The linearized system is described by the following equation:
where:
where denotes differential.
The following four initial conditions are assumed:
where number in the superscript denotes which initial condition is represented.
In the step for Lyapunov indicator 1, 2, 3, 4 the following calculations are performed:
where denotes the assignment operator.
Lyapunov indicator is determined from:
where is the Lyapunov indicator, is time of integration, is the number of time steps.
4. Numerical results of investigations
The following parameters of the investigated system are assumed: 0.01, 0.3, 0.2, 20π, 0.2, 9.81.
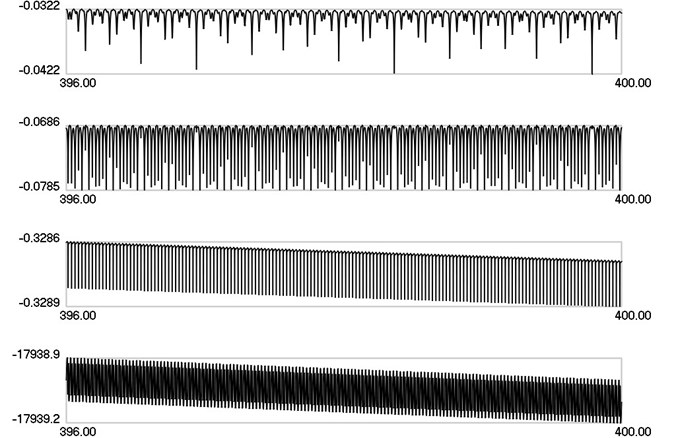
Fig. 1λ1, λ2, λ3, λ4 as functions of time when ω= 10π
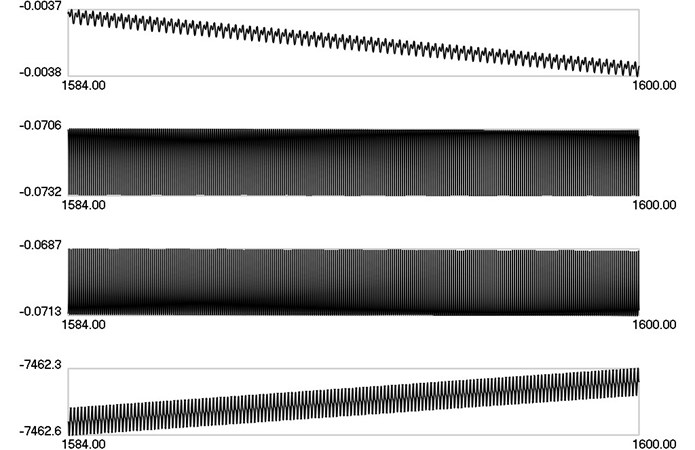
Fig. 2λ1, λ2, λ3, λ4 as functions of time when ω= 15π
4.1. Low frequency excitation
Lyapunov indicators as functions of time when 10 are presented in Fig. 1 and when 15 are presented in Fig. 2.
From the presented results it is seen that all Lyapunov indicators are negative. Thus there is no chaotic motion and measurements can be performed.
4.2. High frequency excitation
Lyapunov indicators as functions of time when 25 are presented in Fig. 3, when 30 are presented in Fig. 4 and when 40 are presented in Fig. 5.
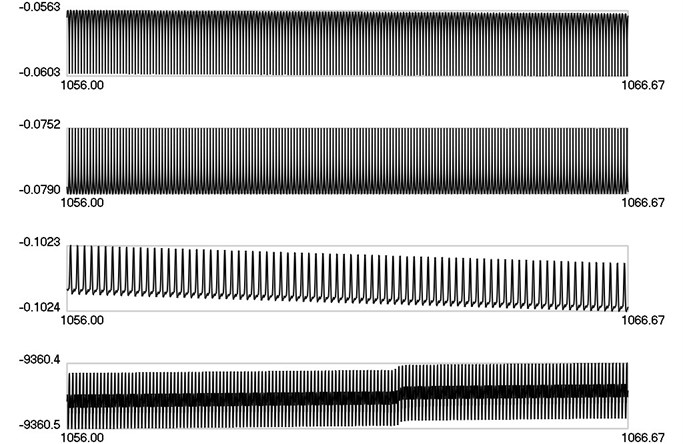
Fig. 3λ1, λ2, λ3, λ4 as functions of time when ω= 25π
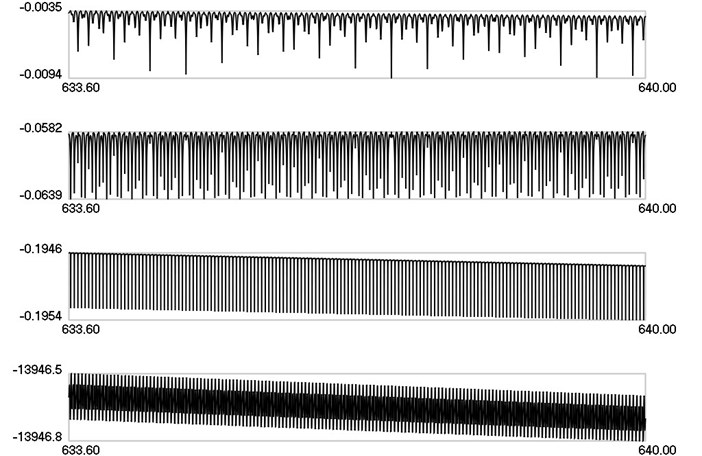
Fig. 4λ1, λ2, λ3, λ4 as functions of time when ω= 30π
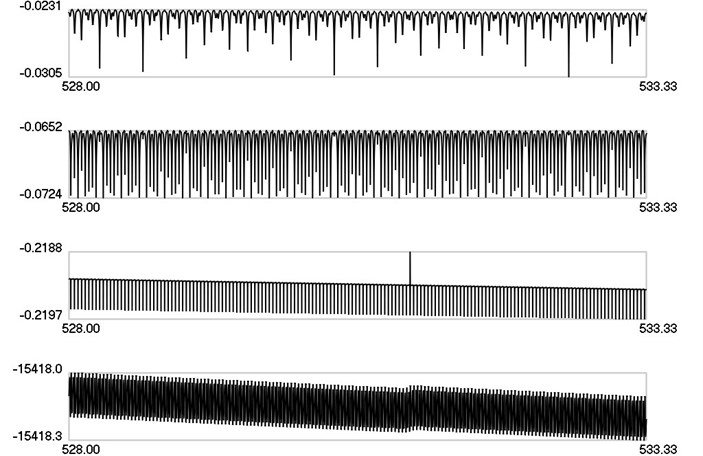
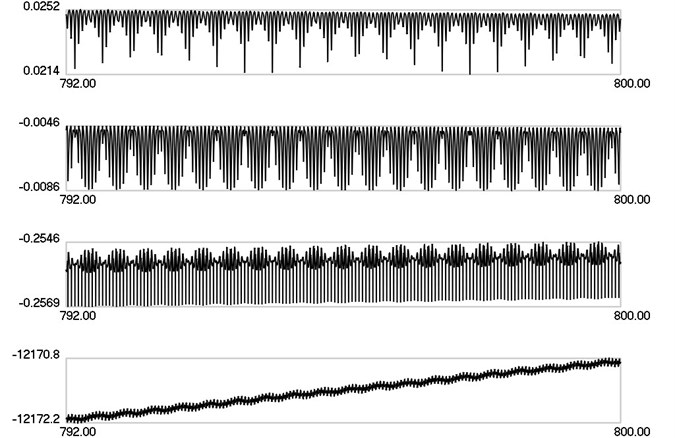
Fig. 5λ1, λ2, λ3, λ4 as functions of time when ω= 40π
From the presented results it is seen that all Lyapunov indicators are negative. Thus there is no chaotic motion and measurements can be performed.
4.3. Chaotic excitation
Lyapunov indicators as functions of time when 20 are presented in Fig. 6.
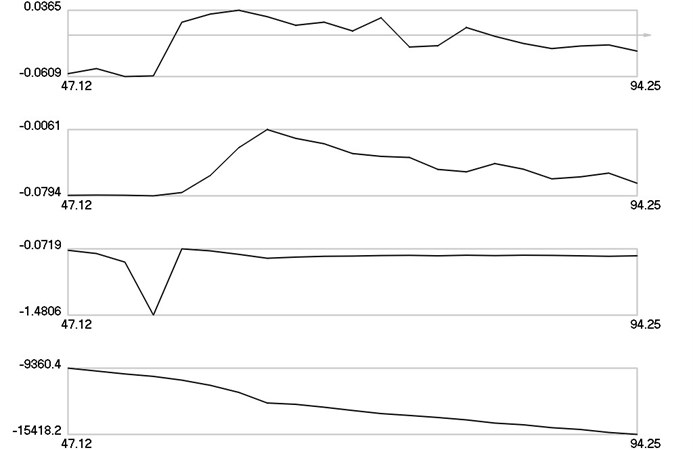
Fig. 6λ1, λ2, λ3, λ4 as functions of time when ω= 20π
From the presented results it is seen that the first Lyapunov indicator is positive. Thus there is chaotic motion and it causes uncertainty in the measurements.
5. Uncertainty of measurement of eigenfrequency
Lyapunov indicators as functions of frequency of excitation in the interval from 15 to 30 are presented in Fig. 7.
From the presented results the interval where the first Lyapunov indicator is positive is approximately seen. In this interval there is chaotic motion and it causes uncertainty in the measurements.
Fig. 7λ1, λ2, λ3, λ4 as functions of frequency of excitation
6. Conclusions
Measurement of eigenfrequency using a dynamically directed vibroexciter is investigated. Lyapunov indicators are calculated for various values of parameters of the system. Low frequency excitations and high frequency excitations are investigated. From the presented results it is seen that all Lyapunov indicators in both cases are negative. Thus there is no chaotic motion and measurements can be performed.
It is shown that when the frequency of excitation coincides with the eigenfrequency there is a positive Lyapunov indicator. Thus chaotic motion takes place and it causes uncertainty in the measurement of eigenfrequency. This fact reduces the precision of the measurement procedure.
Lyapunov indicators as functions of frequency of excitation are obtained. From the presented results the frequency interval where the first Lyapunov indicator is positive is approximately seen. In this interval there is chaotic motion and it causes uncertainty in the measurements of eigenfrequency.
References
-
Neymark Yu. I., Landa P. S. Stochastic and Chaotic Vibrations. Nauka, Moscow, 1987, (in Russian).
-
Dmitriev A. S., Kislov V. Ya. Chaotic Oscillations in Radiophysics and Electronics. Nauka, Moscow, 1989, (in Russian).
-
Zaslavsky G. M., Sagdeev R. Z., Usikov D. A., Chernikov A. A. Weak Chaos and Quasi – Regular Patterns. Nauka, Moscow, 1991, (in Russian).
-
Awrejcewicz J., Krysko V. A. Chaos in Structural Mechanics. Springer, Berlin, 2008.
-
Ueda Y. The Road to Chaos – II. Aerial Press, Santa Cruz, 2001.
About this article
